.png)
First time our solar car was fully driven!

Saturday May 9th, 2026 was a big day for the Seagull Solar team. We gathered at our shop, known as The Cave, at Ralph McKee from 9am to 1pm, and by the end of the session the chassis had moved under its own power for the first time. It has been a long road to get here, and today was proof that all the work is coming together.The morning started with several structural and mechanical items that needed to close out before we could think about driving. Penguin finished the CAD work on the steering rack lateral keepers, which are the components that prevent the rack from moving sideways under load. Those were printed and installed on the car, mounted to the aluminum brackets using M6x1.0 fasteners tapped directly into the bracket material. It is a clean solution to a problem that could have caused serious handling issues if left unaddressed.
Alex, whose nickname is Data in the great tradition of The Goonies, worked on front suspension gussets designed to prevent any torquing of the front suspension assembly at the frame connection points. He also contributed to the floor pan work, which is shaping up to be a full-length polycarbonate belly pan running from the front of the occupant cage all the way back to the motor mount. We measured for that material today. The thickness we wanted was not available from the supplier, so we are going with three sixteenths inch polycarbonate, which is still rigid enough to do the job and frankly saves us a little weight.
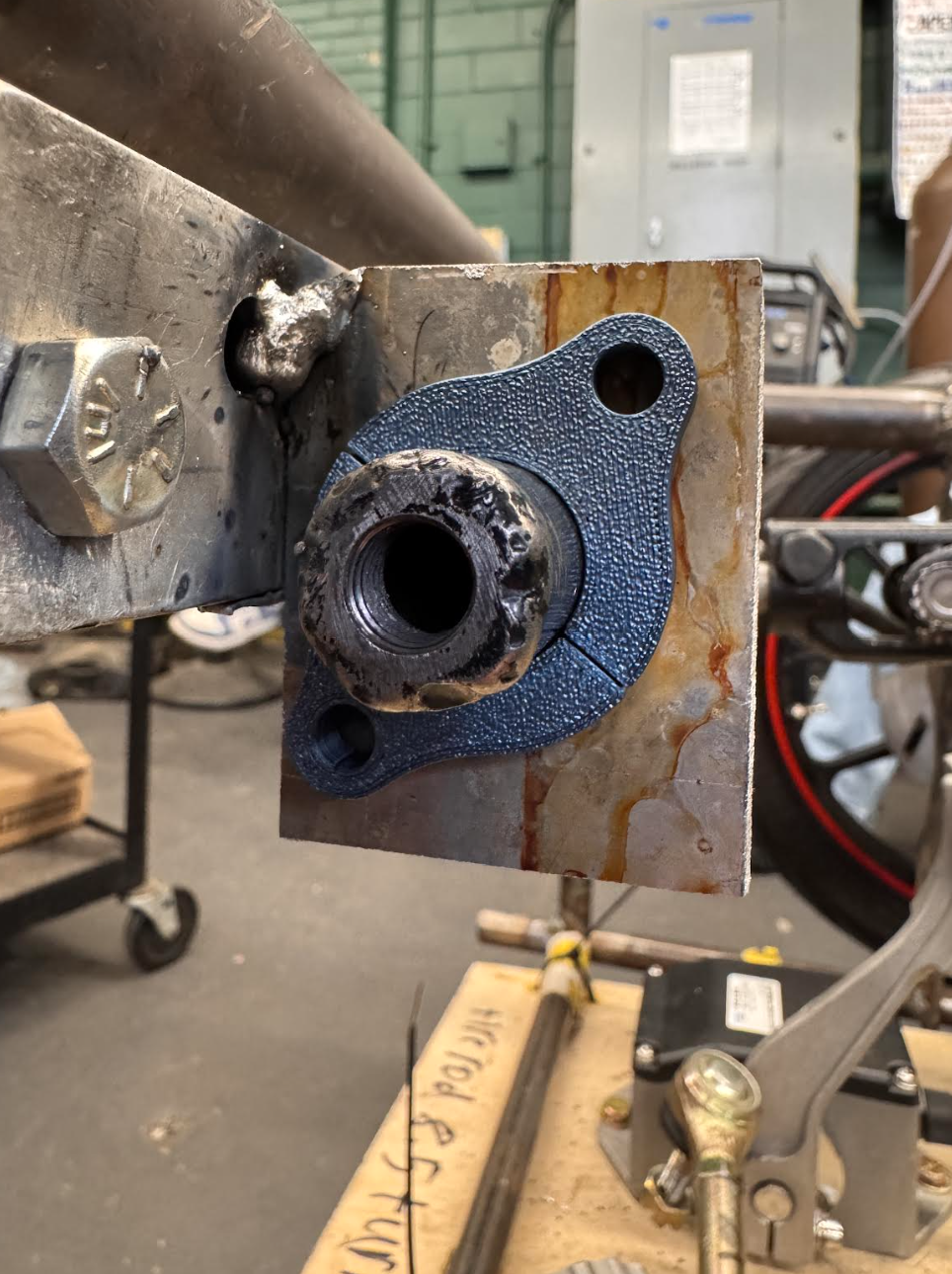
On the rear of the car, Penguin, Xi Nuo, and Ryan Baofeng Bao spent a significant part of the morning working on the rear brake caliper bracket. This is now the fifth iteration of that design, which speaks to how seriously we are taking the geometry back there. The current conversation involves eliminating the gross toe and camber misalignment that has been present in previous versions, and we are also exploring a design that uses threaded features rather than nuts and bolts to simplify assembly and reduce potential failure points. The integrated rear wheel mount and brake caliper bracket was cut today on our TorchMate 4800 plasma table out of three sixteenth inch plate steel, and it combines the motor mount and caliper mount into a single piece.
We also made progress on the front brake system. The solar car rules require two fully independent braking systems, and today we designed the brackets that will hold a dual caliper setup on the front wheels. Those will be cut from aluminum plate at the next meeting and the calipers will be mounted. While assessing the front wheels, which were carried over from the previous Staten Island solar car, we found wear on the bolt heads where they had been contacting the knuckle. We identified the caliper to wheel fasteners as M8x1.25 and replaced all the hardware with grade eight bolts and locking washers. The result was zero visible runout on the wheel, which was a satisfying fix. We are also assessing the condition of the wheel bearings and will be ordering replacements to have on hand in case anything goes wrong during the race.
With the structural work progressing, the electronics crew got to work. Penguin, Xi Nuo, and Ryan Bao installed the full electronics package into the car in a temporary configuration. This was the necessary step to make the first drive possible. Once everything was connected, Alex became the first person to drive the car under its own power, and that is a milestone the whole team has been working toward for a long time.
The first drive gave us real data. The front alignment was off, and the tires were low on pressure, which together created some wheel drag. Airing the tires up corrected a lot of the handling feel immediately, though alignment work is still on the list. The accelerator pedal was mounted in a very temporary location and the mount was flexing, which created what appeared to be electrical or throttle issues that turned out to be mechanical slop. That sent us down a brief diagnostic rabbit hole before we traced it to the pedal mount itself. Out of that came a solid design concept for an adjustable pedal system that will allow us to accommodate different driver heights quickly during the race when kids are rotating in and out of the car.
Off the car, Nathuli continued reaching out to potential sponsors for financial support and material donations. Everton submitted the event insurance payment, which is a critical administrative item off the checklist. We also had a good conversation about race logistics. The team is planning to implement a SORTIMO hardware organization system, the modular toolbox setup that Adam Savage has championed for years, with a master spreadsheet cataloging every fastener for every system on the car. The goal is that during a pit stop at the race, anyone can go into the trailer and immediately find what they need without digging through bins. We also mapped out a multi-point inspection checklist to be run every morning, every lunch break where access allows, and every evening. That checklist will cover bolt torques, anything that may have backed out during a run, wear items like the printed plastic steering rack keepers which are going to see heat and friction over the course of the race, brake pad condition, and alignment.
After a strong four hours of work, the team regrouped at our clubhouse Denino’s Pizzeria for a well-earned lunch. First drive is in the books. Next up is front caliper brackets, pedal system fabrication, and alignment.


Project Manager:
Thomas Smolka
Email:
seagullsolarsi@gmail.com
Telephone:
718-614-4835
Address:
101 Belmont Pl, Staten Island, NY 10301